“如果你拿出你的手机看看,就会发现它是一个非常复杂的电子设备,”他继续说。“尽管一些装配是手工完成的,但设计越来越精细复杂,用手工装配是不合理的,甚至也许根本不可能实现。
“有了机器人,就有了一个多功能的装配工具。所以,也许某天它把螺钉插入的电路板,并在第二天或者甚至在相同的工序中,执行检查操作或者某种类型的分配或精加工。它就是一把瑞士军刀。”
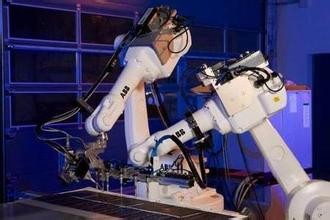
精确零件插件中的力传感
一个由三菱提供的集成力传感器位于机器人臂和爪手之间,用于将接触器正确地插入到热继电器外壳中。该传感器基于在零件定位期间是否有阻力来提供力反馈给机器人。

集成力传感器用于将接触器正确地插入到热继电器外壳中
“有了力传感器,它可以执行搜索以找出哪里的阻力较小,然后根据这些反馈,执行一次干净漂亮的插件动作而不破坏任何东西,”Bonaire解释说。“编程很简单,寻找一个阈值,一旦达到阈值就停止并尝试其他途径。程序只是循环再循环,直到达到阈值”。
一旦接触器正确插入热继电器的壳体中,使用硬性自动化来改变热继电器主体的方向,使它垂直。然后第二个机器人介入,插入分隔不同触点的保护套或内盖。Bonaire说该插内盖动作也用到了二维视觉。
可变夹持装置伺服系统
此应用演示中所使用的伺服爪手也是由三菱提供的,为的是便于即插即用。伺服爪手在小零件装配中更为常见,因为它们可以在不同的位置打开和关闭,可容纳不同大小和形状的零件。
“除了可调节行程所带来的高度灵活性之外,伺服爪手在小零件装配中的另一个优势是它还允许调整所施加的握力量,因而可在不损坏零件的情况下处理小零件,”Bonaire说。“当你拿起一个很小的塑料片时,需要确保不会压碎它。”
伺服爪手提供几乎无限范围的定位选项。臂端工具生产制造商,如SCHUNK、AppliedRobotics和Robotiq也提供伺服夹持装置解决方案。
三菱的伺服爪手并不是唯一的灵活解决方案。
<上一页1
2
3
4
下一页>