“那里有四组不同的爪手,”Bonaire说。“夹具允许机器人的臂端工具根据所需要执行的任务互换爪手。它会夹起完成工作所需的合适工具。”
随机抓取中的三维视觉
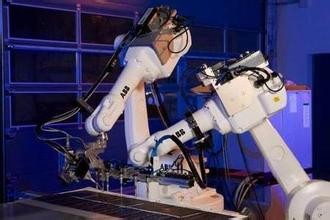
这是位于日本的三菱公司生产工厂的一个用于断路器生产的类似小零件装配过程的实际应用。整个过程中采用了力传感、视觉和其他先进技术。
“贴在机器人手臂上带有三菱徽标的灰色方块是三维视觉系统的一部分,”Bonaire解释说。“我们的系统是一个结构光三维系统,采用了二维相机,并投影一系列的图案来确定表面在哪里,所以那个箱子是个微型投影机。”
一个2D视觉传感器校验零部件位置以便进行装配
他说,三维视觉功能取代了杯式给料器或振动给料器,或者任何用于分隔零件的传统类型给料系统。
“你不必设计、加工和构建给料系统,”Bonaire说。“你基本上只需将零件呈现给机器人,不管什么方向,机器人都会发现它们。有了视觉,你可以用一个系统定位多个零件(而不是需要四到五个不同的杯式给料器馈线)。”
协同控制和防干扰
俗话说,三个臭皮匠赛过诸葛亮,这句话也适用于机器人。协同控制,也称为协调运动。虽然这种技术已经存在了十年,Bonaire说由于应用的需求以及终端用户发现了其能力,他们正更为频繁地使用这一功能。
“如果你知道你有能力获得两个机器人并让它们轻松地一起工作,那么这就可以改变你的整个设计,”他说。“与其让一个机器人先对某个零件做一些处理后将其放下,然后下一个机器人再将其拾起来做一些处理,协同运动更加有效。
“你可以在机器人之间不碰零件,”Bonaire说。“你也可以选择一个零件,然后实时对其重定向,同时另一个机器人在该零件上执行其他任务。这就像用一个魔方,转一侧,而另只手转另一侧。您可以在更短的时间内做更多的事情。而且,如果某个零件太大,机器人们可以携手合作把它拾起来。”
Bonaire说防干扰也有助于使装配过程更加高效。
“传统上,你必须在机器人代码中编写某种类型的握手程序。机器人会在握手程序中说它在空间中的某个特定位置,然后将这些信息发送给相邻的机器人,以确保它们不会进入该工作区,”他解释说。“这会减慢速度,因为机器人会不停地等待。
“有了这个防干扰功能,会通过建立一个机器人到下个机器人的参考而自动应对所有的事情,”他继续说。“即使你可以用传统的编程做到这一点,那创建可以快速实现这样功能的代码也将是非常困难和耗时的。”
有了防干扰技术,而不是等待一个机器人与另一个机器人通信,它们的行为更像是一台机器。
一台有双臂的机器人会怎么样?专为消费电子行业而设计,具有和人类同事并排工作的独特外形与协作功能。这就是ABB的YuMi机器人。
<上一页1
2
3
4
下一页>
余下全文