“准确度始终是我们的一个挑战,”Freedman说:“对这些可能仅需调整正负千分之一英寸的应用或进入到微米领域来说,需要真正精确的机器人。对于我们的具体应用,我们发现SCARA机器人比同等大小的六轴臂更精确。
“装配配件时不影响密封和产品的完整性是非常重要的。当人们打开套件时,它必须是无菌的。装置的一侧有个药瓶,另一侧也有一个药瓶,有一个非常尖锐的设备将刺穿小瓶。装配过程中需要非常接近那个装置,但需要确保不会捅破它。我们使用伺服执行器来做这一切并用力反馈来确认。”
用于精细装配的力反馈和视觉
称重传感器装配力监测使用力传感器来跟踪整个装配过程,以确保不会超过允许的最大力。
“玻璃药瓶非常具有挑战性,”Freedman解释道。“每一个玻璃药瓶都有完全不同的尺寸特性。爪手是专为洁净室环境而设计的,尺寸公差非常明确。它们从药瓶瓶颈的每一侧进入。需要确保不会划伤或挤压药瓶,但要准确地抓住它,提供强大且足够安全握力,这样当以全速快速移动时药瓶也不会改变。”

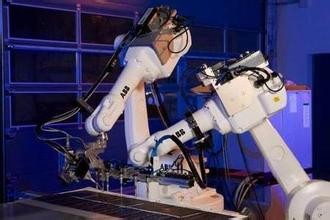
SCARA机器人为集中式光伏设备装配零部件
正如在许多DynamicAutomation的设备中所做的那样,视觉技术在该医疗设备装配中扮演着不可或缺的作用。
“很多时候,这种产品所使用的托盘是一次性的,因为客户不希望花很多钱在它们身上。它们是模制零件,所以公差对我们来说太大,因而不能假设药瓶都在爪手抓取的预期位置。这就是为什么我们使用一个视觉系统来定位产品(在本案例中是药瓶)。
“在这种情况下,DENSO和康耐视通信越多,技术越透明且更对用户友好,不只是对集成商,对客户也是如此,对业界也越好”Freedman说。“我会说我们的机器人应用,50%以上都集成了视觉功能,而且这种趋势还在增长。”
<上一页1
2
3
4
下一页>
余下全文