机器人(Robot)是1920年由捷克作家卡雷尔·查培克在剧本中塑造的一个具有人的外表、特征和功能,愿意为人服务的机器奴仆“Robota”一词衍生出来的。我们可以这样说:机器人是一个在三维空间中具有较多自由度的,并能实现诸多拟人动作和功能的机器;而工业机器人(IndustrialRobot)则是在工业生产上应用的机器人。

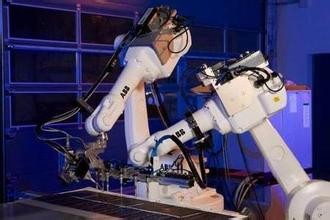
图1-1 工业机器人抓零件A至B处
1-1表示一个搬运工业机器人正在进行搬运作业,它从许多零件中取出零件A,把它搬到B处。美国机器人工业协会(U.S.RIA)提出的工业机器人定义为:“工业机器人是用来进行搬运材料、零件、工具等可再编程的多功能机械手,或通过不同程序的调用来完成各种工作任务的特种装置。”机器人协会、日本机器人协会等也采用了相类似的定义。国际标准化组织(ISO)曾于1987年对工业机器人给出了定义:“工业机器人是一种具有自动控制的操作和移动功能,能够完成各种作业的可编程操作机。”ISO8373对工业机器人给出了更具体的解释:“机器人具备自动控制及可再编程、多用途功能,机器人操作机具有三个或三个以上的可编程轴,在工业自动化应用中,机器人的底座可固定也可移动。”
一台数控机床有若干独立的坐标轴运动,也可再编程,能完成不同程序的加工作业。因此,工业机器人和数控机床在运动控制和可编程上是很相似的。尽管复杂一些的数控机床也能把 装载有工件的 托盘移动到机床 床身上从而实现 工件的搬运和定位, 但是工业机器人通常在抓握、操纵、定位对象物时比传统的数控机床更灵巧, 在诸多工业生产领域里具有更广泛的用途。
工业机器人最显著的特点有以下几个。
(1) 可编程。生产自动化的进一步发展是柔性自动化。工业机器人可随其工作环境变化的需要而再编程, 因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统( FM S) 中的一个重要组成部分。
(2) 拟人化。工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分, 在控制上有电脑。此外, 智能化工业机器人还有许多类似人类的“生物传感器”, 如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。
(3) 通用性。除了专门设计的专用的工业机器人外, 一般工业机器人在执行不同的作业任务时具有较好的通用性。比如, 更换工业机器人手部末端操作器( 手爪、工具等) 便可执行不同的作业任务。
(4) 机电一体化。工业机器人技术涉及的学科相当广泛, 但是归纳起来是机械学和微电子学的结合—— 机电一体化技术。第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能, 这些都和微电子技术的应用, 特别是计算机技术的应用密切相关。因此, 机器人技术的发展必将带动其他技术的发展, 机器人技术的 发展和应用水平也可以验证一个国家科学技术和工业技术的发展和水平。
二、工业机器人与环境交互
一个工业机器人 所具备 的功能在本质上 是由其机械部分、传 感部分、控 制部分内 部集成(Internal Integrat ion) 所决定的。但是, 工业机器人的作业能力还决定于与外部环境的联系和配合, 即工业机器人与环境的交互能力。例如, 上下料机器人在与冲压设备的交互中感知模具开启状态、工件馈送器状态等信息, 与外部设备的节拍协调一致, 实现正确无误的动作。所以,工业机器人与环境的交互是一个重要问题。
工业机器人与外部环境的交互包括硬件环境和软件环境。
(1) 与硬件环境的交互主要是与外部设备的通 信、工作域 中障碍和自由空间的描述、操作对象物的描述。
(2) 与软件环境的交互主要是与生产单元监控计算机所提供的管理信息系统的通信。工业机器人在与外部环境协调、配合中构成外部集成(E xt ernal Integ ration) 。工业机器人不仅要与已知的定义了的外部环境进行交互, 而且有可能面临变化的未知的外部环境。在这种情况下工业机器人仅仅实现可编程控制是不够的。工业机器人被引导去完成任务时, 在任何瞬时都要对实际参数信息与所要求的参数信息进行比较, 对外部环境所发生 的变化产生新 的适应性指令, 实现其正确的动作功能, 这就是工业机器人的在线自适应能力。比如, 手部配置有力传感 器的装配机器人, 在进行圆销插入作业时, 需要比较销与孔的位置信息, 并且力传感器还要获 得装配过程中零件的接触特征, 从而进行微量移动控制, 并利用手部的柔顺性实现圆销插入作业。工业机器人与环境更高一层的交互是从外部环境中感知、学习、判断和推理, 实现环境预测, 并根据客观环境规划自己的行动, 这就是自律型机器人、智能化机器人。工业机器人与环境交互是机器人技术之关键。工业机器人在没有人工干预的情况下对外部环境的自我适应, 行动的自我规划, 将是今后机器人技术及其应用的研究方向。