2012年,美国工程师协会的机器人和自动化杂志(Robotics & Automation Magazine,IEEE)出版空中机器人和四旋翼(Aerial Robotics and the Quadrotor)专刊,总结了阶段性成果,展示了当时最先进的技术。在这期间,之前不具备多旋翼控制功能的开源自驾仪增加了多旋翼这一功能,同时也有新的开源自驾仪不断加入,这极大地降低了初学者的门槛,为多旋翼产业发展装上了翅膀。
爆发期:2013年至今
2012年初,大疆推出小精灵Phantom一体机。Phantom与AR.Drone一样控制简便,初学者很快便可上手。同时,价格也能被普通消费者接受。相比AR.Drone四旋翼飞行器,Phantom具备一定的抗风性能、定位功能和载重能力,还可搭载小型相机。当时利用Gopro运动相机拍摄极限运动已经成为欧美年轻人竞相追逐的时尚潮流,因此Phantom一体机一经推出便迅速走红。
连线杂志主编C.Anderson于2012年年底担任3D Robotics公司CEO,该公司于2013年8月推出Iris遥控四旋翼飞行器,于2014推出X8+四旋翼飞行器,并很快于2015年推出Solo四旋翼飞行器。

(多旋翼主要开源项目一览表)
此时,学术界对于多旋翼的研究更偏向智能化、群体化。2013年,苏黎世联邦理工学院的R.D'Andrea教授在TEDGlobal的机器人实验室展示了四旋翼的惊人运动机能。纵观学术界的发展,以“四旋翼(quadrotor)”和“多旋翼(multirotor)”为关键词的文献在近年成井喷趋势。这些研究往往具备前瞻性,将推动多旋翼产业未来的发展。
3、 新技术促产业快速变革
多旋翼的性能会因其他技术的进步而进步,其相对固定翼和直升机的优势也会进一步凸显。
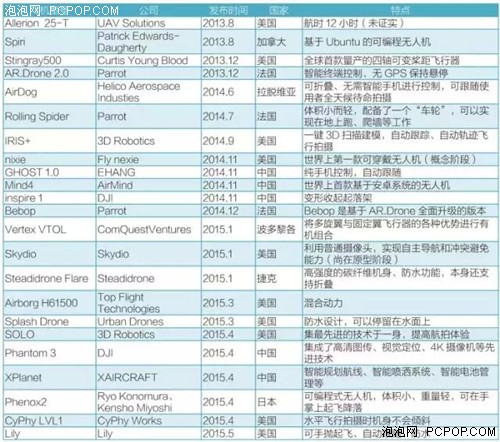
(近期发布的多旋翼飞行器产品一览表)
<上一页1
2
3
4
5
6
7
8
9
10
下一页>
余下全文
















