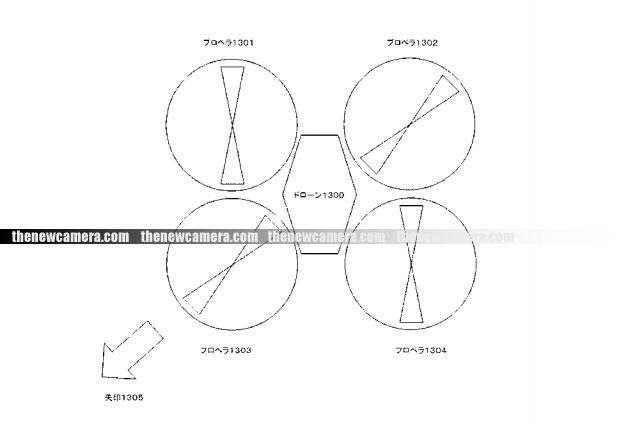
相同时,就平衡地飘浮在空中,如果其中一个螺旋桨进行加速那无人机会朝那个方向加速飞去,而如果任意两端的螺旋桨的转速大于其他两端的转速,无人机就能进
行旋转。通过四个螺旋桨速度的变化,无人机可以不断改变自己的飞行速度和方向。

无人机螺旋桨工作原理
Kumar和他的学生团队正是利用了这个原理,他们创造了一种新的 算法 程序,使得装在无人机上的处理器在判断四个螺旋桨需要执行哪些动作后,快
速把它们组合起来,然后决定给螺旋桨下什么指令。“我们的处理器可以实现一秒钟600次指令,来稳定控制这个无人机,所以它的反应是非常灵敏
的。”Kumar介绍道。
除此之外,他们还在无人机上安装了一个微型动态监控摄像机,通过每秒记录一百幅画面来辅助处理器快速做出反应,不仅告诉无人机它们自己的位置和
障碍物的具体位置,甚至遇到障碍物突然移动的情况,处理器也可以快速预测怎么才能最有效地钻过去。“我们的处理器会创造一个光滑优雅的运动曲线,来提醒无
人机绕开障碍物,而无人机也能够记住自己走过的所有轨迹。”Kumar说。
除了处理器和摄像机,Kumar和他的学生团队还给无人机装上了激光测距仪和激光扫描仪,使得无人机在进入一个完全陌生的环境时,可以利用这些
来自己制作描绘周围环境的地图,而这个地图与我们普通所见的地图不同,包括窗户、玄关、人和家具等很多细节,同时还能弄清相对于这些东西无人机自己的位置
在哪里,甚至能找到出路。
“与普通的无人机不一样的是,这种无人机所有的运动都是自主的,我们所做的只是给它们一个蓝图。”Kumay提到,而普通无人机往往需要有人来
辅助完成协调系统。这款无人机的原理来自于一种沙漠蚂蚁,Kumar介绍说,这种蚂蚁一起搬运重物时,没有任何中央调控,也没有明确交流,却能够靠着感应
邻近的蚂蚁和抬着的重物来形成一种默契,以同样的速度和同一个方向去挪动重物。